According to AI (artificial intelligence) computer vision company Nexar, today’s digital maps fall short of the freshness and precision that software-driven automotive OEMs, autonomous vehicles, and mobility players require. Standard mapping methods—such as SD, HD, and traffic maps—fail to provide accurate, up-to-date, and cost-effective solutions.
So, the company has released CityStream Live, the company’s RTM (real-time mapping) platform. The “first of its kind” solution enables the mobility industry—including connected vehicles, maps, mobility services, digital twins, and smart city applications—to access a continuous stream of fresh, crowdsourced road data.
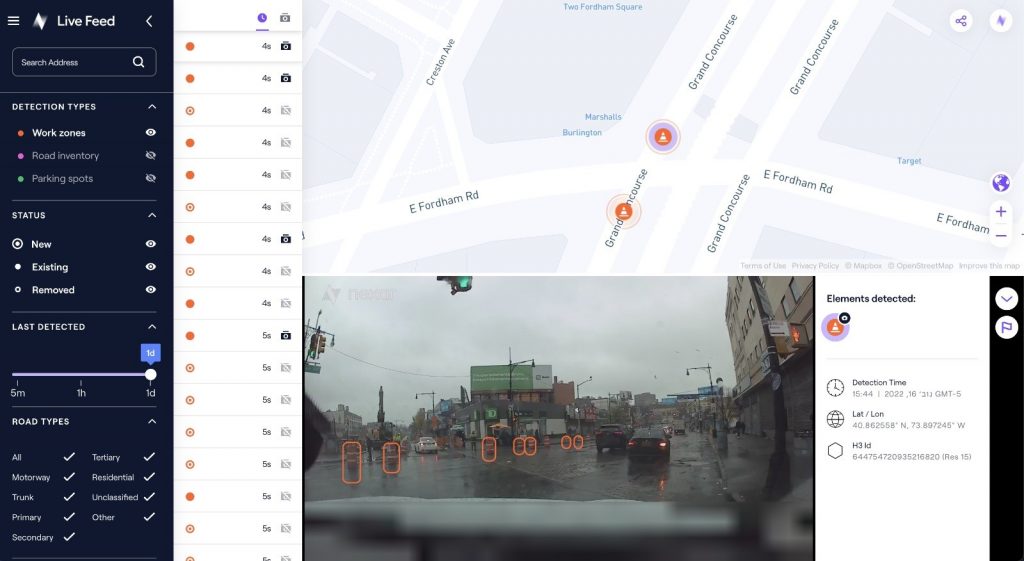
According to the company, only with real-time data can vehicles really know what’s coming their way, react to varying speed limits, avoid work zones, find parking, and someday drive themselves. Thanks to its network of “eyes on the road,” edge AI, and change-detection capabilities, CityStream Live is already available to industry design partners.
“Other companies in this space, such as Tesla and Mobileye, have been working on similar mapping capabilities,” said Eran Shir, Nexar’s CEO and Cofounder. “However, their solutions are dependent on closed platforms and specific car models, which makes them unsuitable for general use in a vast range of vehicles and mobility applications.”
CityStream Live uses the same principles as Google PageRank did back in the 1990s, harnessing crowd wisdom to index the web at 40x lower costs.
“This allows partners and customers the real-time mapping APIs and tools they need in a technology-agnostic way, independent of the camera or base map used,” Shir added. “Our real-time mapping is ready and available for you and your business needs, no matter what vehicle.”
By introducing new and disruptive RTM technologies at the edge of the network, the new offering is said to be transforming how road information is captured and delivered to the mobility ecosystem. In addition to the company’s applications for detecting work zones, road sign changes, potholes, and free parking spaces, the new platform will provide “unprecedented” levels of freshness on nearly every road across the U.S. at a dramatically reduced cost.
Utilizing a crowdsourcing network and edge AI software, CityStream Live offers users and developers a live data feed to increase situational awareness, enhance driving capabilities, increase safety, add comfort, and help solve everyday mobility challenges.
As autonomous vehicles begin to proliferate, a paradigm shift in map-making is needed, according to Shir in a blog post earlier this year. The mapping paradigm must change, he believes.
“First, the old ways break when we start demanding a level of freshness measured in months, weeks, days, or minutes,” he said. “Second, the cost of creating and maintaining a complete map powered by crowdsourcing is orders of magnitude cheaper than using a dedicated fleet to roam the roads, allowing it to scale globally and to all levels of freshness required. The difference in costs is dramatic – dollars per mapped mile instead of hundreds of dollars per mapped mile.”
The autonomous mapping revolution is enabled by a convergence of trends. Connected cameras are embedded in every vehicle; edge AI is powerful enough and cheap enough to scale and automate data collection, localization, and synthesis; communication costs are plummeting; and bandwidth is expanding faster than ever.
Most interestingly, the typical mobility consumers of mapping services—OEMs, AV companies, fleets, and other players that depend on accurate maps to operate—are increasingly realizing that they need to take part in producing maps, not just consuming them, and that crowdsourcing is the only scalable path forward.
“We are moving from a slow, expensive operation, dependent on dedicated fleets of data collection vehicles, a la Google StreetView, into an era of crowdsourced vision, in which every vehicle is equipped with sensors and cameras and contributes to the creation and updating of the autonomous map,” he wrote.
With over 700,000 vehicles driving around the U.S. with AI dash cams in Nexar’s network of cameras capturing 94% of U.S. roads each month, the company collects 3 billion miles of road vision data per year. By combining massive data aggregation with on-the-fly data curation, CityStream Live is the first platform to deliver road data streams in real-time and at scale, supporting a number of urban and highway use cases.
To create a true real-time map, many more OEMs and fleets need to join the effort, according to Shir.
“The industry, which traditionally had a culture of non-cooperation, should come together to collaborate because there’s not a single OEM or fleet on the planet that can see every corner of the earth every minute,” he wrote. “As we all come to realize that accurate real-time mapping is not just a convenience but is a critical safety and operations issue, we will need to realize collaboration is a must. Just as the airlines realized that when it comes to safety data standards, they must collaborate and share information, so will the mobility industry.”

